目次
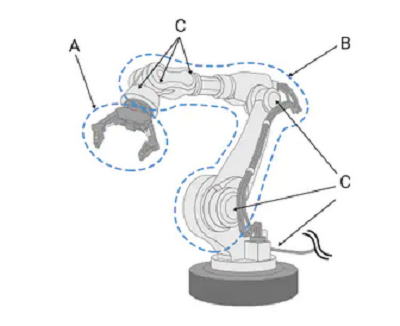
産業用ロボットのハンドとは、ロボットアームの先端部に取り付けられた手先のことです。実際に物をつかんだり吸着したりする部分で、大きく、「把持ハンド」と「吸着ハンド」に分けることができます。
産業用ロボットのハンドが持つ機能やトレンド、具体的な製品を紹介します。
・産業用ロボットのハンドには把持ハンドと吸着ハンドの2つの種類がある
・ローコストで滑らかな動きをするハンドや、包み込むように吸着するハンドも登場している
・ハンドは、対象物の素材や柔らかさ、重量などに合わせて選ぶ必要がある
産業用ロボットのハンドとは?
産業用ロボットのハンドとは、対象物と直接接する部分のことです。通常はロボット本体から伸びたアームの先端についている。対象物に触れる方式によって、「把持ハンド」と「吸着ハンド」に分けることができます。
引用元:https://www.keyence.co.jp/ss/products/vision/fa-robot/industrial_robot/robotic-arm.jsp
把持ハンド
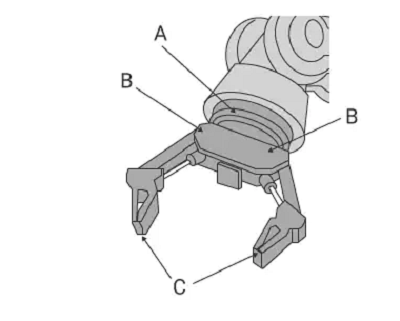
人の指のような細い先端部が2本以上ついており、指で対象物をつかむハンドを「把持ハンド」と呼びます。指が増えると安定感が増すため、対象物を落としにくくなります。
引用元:https://www.keyence.co.jp/ss/products/vision/fa-robot/industrial_robot/robotic-arm.jsp
吸着ハンド
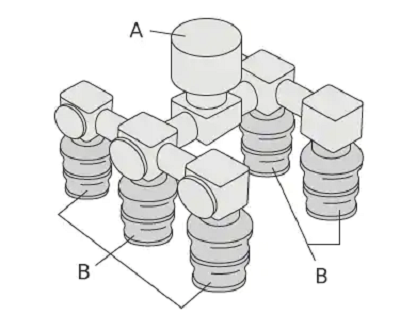
真空や磁力などによってパッド(吸着パッド)に対象物を吸いつけて固定するハンドを「吸着ハンド」といいます。パッド部分が複数あることで、対象物を安定して保持できるようになります。
引用元:https://www.keyence.co.jp/ss/products/vision/fa-robot/industrial_robot/robotic-arm.jsp
産業用ロボットのハンドのトレンド
産業用ロボットのハンドは日々進化しています。保持できる対象物の範囲が広がり、ホールドする力も対象物に合わせてコントロールされています。産業用ロボットのハンドにおける近年のトレンドを紹介します。
ローコストで滑らかな動きを実現
多軸ロボットにおいては、軸の数が多いほど滑らかな動きができるとされていました。実際に、5軸、6軸のロボットハンドが多軸ロボットの主流を占めています。
しかし、わずか2つのモーターで滑らかな動きを実現するロボットハンドも出現しています。モーターが少ないため、価格が安く、稼働にかかるエネルギーが少ない点も魅力です。
パッドではなく包み込むように吸着するハンド
吸着ハンドは、パッドの吸着する面が平らになっていることが一般的です。しかし、吸着する面が折り紙のように収縮拡大するハンドも誕生しています。包み込むように吸着するので、平面状のものでなくてもホールドすることができます。
産業用ロボットハンドの製品を具体的に紹介
ロボットハンドは種類が多く、またメーカーによってもさまざまな特性を持つハンドが販売されています。日本で販売されているロボットハンドをいくつか紹介します。
石川ケミカル「カーボンファイバー強化ロボットハンド」
石川ケミカルの「カーボンファイバー強化ロボットハンド」は、ハンド部分にカーボンファイバーを用いることで、アルミと比較して約4割の軽量化を実現したハンドです。軽いので稼働させるときのエネルギーが少なくて済むというメリットがあります。
また、カーボンファイバーはスチールよりも高剛性があり、300℃以上に耐えられる耐熱性や加工技術にも優れているため、汎用性が高いというメリットもあります。

引用元:https://premium.ipros.jp/unicon_kinouzai/product/detail/2000215745/
ソーラーリサーチ研究所「キャリアー用非接触ロボットハンド」
ソーラーリサーチ研究所の「キャリアー用非接触ロボットハンド」は、非接触の状態でウエハの搬送が可能なハンドです。ハンドが薄いので、キャリアーへのウエハの出し入れが可能な点も特徴です。
また、衛生管理がしやすく、クリーンルーム内での使用にも適しています。アライメントが可能なため、汎用性が高いことも特徴といえるでしょう。
引用元:https://www.ipros.jp/product/detail/2519030
シュマルツ「モジュール式ロボットハンド」
シュマルツの「モジュール式ロボットハンド」は、吸着パッドの種類・個数・配置を自由に組み合わせられるモジュール式のロボットハンドです。パウチ袋やフォイル、段ボール箱など、吸着対象製品の材質やサイズに合わせて吸着パッドを選択し、ハンドを構築することが可能です。
個々のパーツが既に完成した状態で販売されているので、ハンドの組立は手作業で簡単に行えます。対象物に合わせてパーツを交換すれば、導入するロボットの台数も抑制でき、コストダウンにもつながります。また、ハンド自体が軽量かつコンパクトで、高速搬送のアプリケーションにも活用できます。

引用元:http://www.schmalz.co.jp/products/vacuum-gripper/end-effector.html
因幡電機産業「協働ロボット向けハンド」
因幡電機産業の「協働ロボット向けハンド Gecko SPx」は、ヤモリの性質から発想を得た、多孔質の表面や光沢のある材質を吸着しても、跡を残さない粘着型のハンドです。粘着跡が付かないため、対象物の範囲が広がります。
対象物の大きさや重量に合わせて3種類から選択できます。また、ホールド力が高いため、プリント基板や金属網などの従来であれば吸着ハンドによる移動は難しかった対象物にも対応します。

引用元:https://www.ipros.jp/product/detail/2000510058
ダブル技研「ロボットハンド D-Hand」
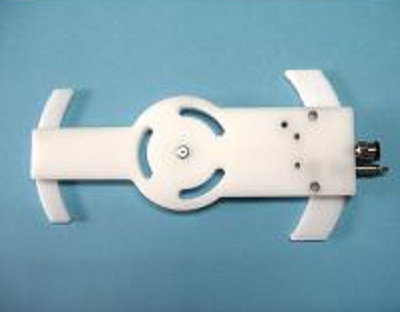
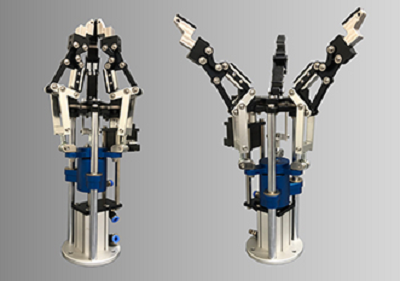
ダブル技研の「ロボットハンド D-Hand」は、物の形状になじむタイプのハンドです。協同ロボットを始めさまざまなメーカーのロボットとの組み合わせが可能で、形状にとらわれず、フレキシブルな把持を実現しています。
また、センサーなしに多彩な作業を行える点も特徴です。アクチュエータの変更など、カスタム対応できるので、対象物や用途にあったハンドを製作することが可能です。
引用元:https://www.j-d.co.jp/dhand/dhand_top.html
産業用ロボットのハンドを選ぶときのポイント
ロボットハンドを選ぶときは、以下のポイントに留意するようにしましょう。
- 対象物の重量
- 対象物の形状
- 対象物の柔らかさ
- 輸送スピード
- 保守性
- 安全性
- 周辺機器との関係
対象物の重量
しっかりとホールドする把持ハンドは重量の重いものにも向いています。一方、特殊なタイプを除き、吸着ハンドは一般的に軽量の対象物に向いています。
対象物の形状
磁力パッドは平面の対象物に限られます。一方、把持ハンドや真空パッド型の吸着ハンドは様々な形状に対応できます。
対象物の柔らかさ
磁力パッドの吸着ハンドと把持ハンドは、基本的には硬いものに向いています。柔らかいものは真空パッドが向いています。
輸送スピード
しっかりとつかむ把持ハンドは輸送スピードが速いという特徴がありますが、つかむのに時間がかかります。一方、吸着ハンドは一瞬で吸着しますが、輸送スピードについては吸着力に左右されます。
保守性
長持ちするのは把持ハンドです。吸着ハンドはパッドの目詰まりなどで劣化するので、定期的に交換を必要とします。
安全性
安全への配慮がおろそかになると、ハンドの種類に関係なく事故を引き起こすことがあります。作業スペースに立ち入るときはロボットの作業を減速あるいは停止させましょう。
周辺機器との関係
ロボットハンドと他の機器を連携させて使用する場面が多いです。仕様が連携可能か、また、協働作業に向いているのかも確認しておきましょう。
まとめ
ロボットハンドは、対象物の特性に合わせて選ぶ必要があります。また、近年では従来は不可能とされていた多孔質や非平面の物質も吸着ハンドでホールドできるなど、技術の進歩が見られます。対象物の特性に合わせて、また、他の物質への汎用性もチェックした上で、適切なハンドを選んでいきましょう。