目次
ロボットアームの仕組みは、動きと構造に分けて理解することができます。現在主流となっている6軸垂直多関節型ロボットのロボットアームを例に、動きと構造に分けて仕組みを解説します。また、6軸垂直多関節型ロボット以外のロボットアームの仕組みも、特徴も交えて紹介します。
・ロボットアームはジョイントとリンクから成り立つ
・ロボットアームを動きから分類すると、先端部から遠い順に1軸、2軸と分けられる
・構造から分類すると、アクチュエータ、減速機、エンコード、伝導機構の4つに分けられる
ロボットアームの基本的な構造
ロボットアームの構造は、ジョイントとリンクの2つから成り立ちます。
ジョイント
人間の腕に例えれば、関節に相当する部分を「ジョイント」と呼びます。ジョイントが多いと、滑らかな動きに繋がります。
リンク
「リンク」は、人間の腕に例えれば骨に相当する部分です。リンクを使ってハンド部分に力を伝えるので、作業の対象や内容に合わせた重量、剛性が必要になります。
動きから見たロボットアームの仕組み
ロボットアームは、サーボモーターの力でジョイントを可動させ、リンクを移動させつつハンド部分に相当する先端部を目的の位置に移動させます。主流の6軸垂直多関節型のロボットアームを例に、軸ごとに詳しく解説します。なお、ここでは、先端部(ハンド)から遠い順に1軸、2軸とします。
- 1軸:土台の回転運動
- 2軸:アーム全体の上下運動
- 3軸:関節部分の屈伸運動
- 4軸:ハンドとの接合部分の回転運動
- 5軸:ハンドとの接合部分の屈伸運動
- 6軸:ハンド先端部分の回転運動
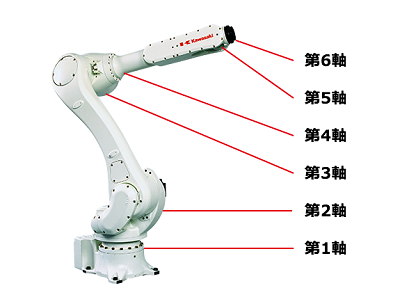
引用元:https://robotics.kawasaki.com/ja1/xyz/jp/1804-03/
1軸:土台の回転運動
もっとも先端部から遠い1軸は、アームの土台全体を回転させる運動を行います。人間に例えれば腰をまわす動きです。
2軸:アーム全体の上下運動
土台につながる2軸では、アーム全体の上下運動を行い、作業の高さを調節します。人間の肩の上げ下げの動きに相当します。
3軸:関節部分の屈伸運動
3軸は、アームの中央部分の関節の屈伸運動に担当する部分です。人間のひじの曲げ伸ばしに相当します。
4軸:ハンドとの接合部分の回転運動
4軸は先端部に近く、ハンドとの接合部分の運動を担う部分です。人間の手首の回転運動に相当します。
5軸:ハンドとの接合部分の屈伸運動
5軸は、ハンドとの接合部分の屈伸運動を担当する部分です。手首を曲げる動きに相当します。
6軸:ハンド先端部分の回転運動
6軸は、ハンド先端部分の回転運動を担当する部分です。人間の腕に例えれば、指先の回転運動に相当します。
構造から見たロボットアームの仕組み
ロボットアームの仕組みは、構造から見ると次の4つに分けることができます。それぞれの役割や動きを解説します。
- アクチュエータ
- 減速機
- エンコーダ
- 伝導機構
アクチュエータ
アクチュエータとは、モーターなどに代表されるロボットアームの関節を構成する要素で、実際にアームを動かす稼働力の元となるものです。産業用ロボットには、サーボモーターと呼ばれる、位置や速度の制御が可能な高機能のアクチュエータが搭載されています。
減速機
アクチュエータだけでもアームを動かすことができますが、減速機があることでアクチュエータの出力を増大することができます。通常はアクチュエータ1つに減速機1つがペアになっていて、各アクチュエータの動きを制御しつつ最大限のパフォーマンスを実現します。
エンコーダ
アクチュエータの回転軸の位置を検出するための装置をエンコーダと呼びます。一般的な光学式エンコーダでは、アクチュエータの回転軸に円板が取り付けられている構造で、発光ダイオードなどを用いて位置検出をスムーズに行います。
伝導機構
アクチュエータや減速機を通して得た力をロボットアームに伝えるのが伝導機構です。伝導機構を搭載していることで、ロボットアームの力の向きや大きさを変えることが可能になります。
6軸垂直多関節型アーム以外のロボットアームの仕組み
ロボットアームを制御する構造は、アームの種類によっても異なります。6軸垂直多関節ロボット以外の代表的なロボットである「スカラロボット」と「パラレルロボット」、「直交ロボット」の仕組みと制御機能を、種類ごとに解説します。
スカラロボット
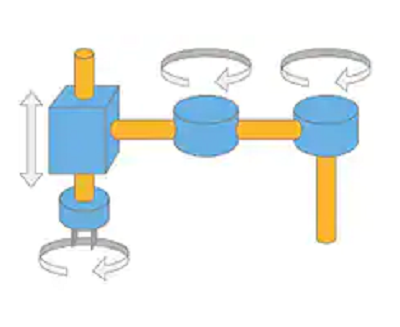
引用:https://www.keyence.co.jp/ss/products/vision/fa-robot/industrial_robot/robotic-arm.jsp
スカラロボットは、ジョイントとリンクがすべて水平方向に動作するロボットです。先端部のみ垂直方向に動くことで、対象物に対する作業が可能になります。水平方向には流れるようなしなやかな動きを実現するのもスカラロボットの特徴です。
スカラロボットの軸数は4軸が一般的です。アームが水平方向に旋回する動作と、先端部分が垂直方向に上下する動作を組み合わせて動きます。構造がシンプルなため高速動作が可能で、先端部分が上下に動作する特長を生かして、プリント基板への電子部品の実装など行います。
パラレルロボット
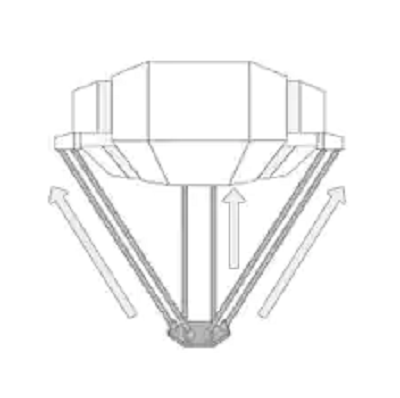
引用元:https://www.keyence.co.jp/ss/products/vision/fa-robot/industrial_robot/robotic-arm.jsp
パラレルロボットは、リンクとジョイントで構成するアームを並列に複数配置した構造です。リンクと軸の組み合わせにより、多様な動作が可能になります。複数のサーボモーターの出力を1点集中することもできるので、省電力化にもつながります。
全体的にみると、本体から伸びた3本のアームが先端で一体になった構造です。ツールは一体になった先端部分に取り付けられます。アームそのものを軽量化することで、動作を速くすることができるのもパラレルロボットの特徴です。また、上下運動だけのため可動領域は狭いですが、3本のアームが先端部分を動かすので、可搬質量に対して高速だという点にも注目できます。
直交ロボット
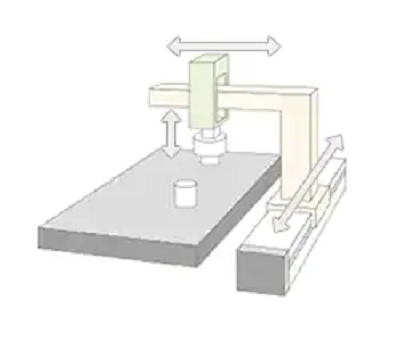
引用元:https://www.keyence.co.jp/ss/products/vision/fa-robot/industrial_robot/robotic-arm.jsp
直交ロボットとは、直交するスライド軸を組み合わせた構造のロボットです。リンク部分がスライド軸に沿って動くので、シンプルな反復運動を得意としています。
直交ロボットは、そのシンプルなアーム構造から、単純な反復運動にも適しています。また、スライド軸に沿って動くため、動きの範囲を予想しやすく、人との作業が容易であるという点も直交ロボットの特徴です。流れ作業など、人と産業用ロボットが協力して働く場面で、多く活躍しています。
まとめ
ロボットアームの構造はシンプルで、人間の腕の骨に相当する「リンク」と関節に相当する「ジョイント」から成り立っています。ロボットアームの仕組みは「アクチュエータ」と「減速機」、「エンコーダ」、「伝導機構」の4つから成り立ち、それぞれが作用し合ってロボットアームならではのスムーズかつ高速の動きを実現しています。ロボットアームは種類によっても構造や動き、可搬重量などが異なるので、対象物や作業の内容から適切な種類を選択するようにしましょう。