
目次
多関節ロボットには特定の姿勢になると制御できなってしまう特異点があります。特異点を避けるためにも回避機能のついたロボットの導入や工夫して姿勢制御を行う必要があります。今回は、特異点について詳しく解説しますので最後までお読みください。
・特異点はロボットが暴走するなど制御できなくなる姿勢のこと
・特異点を回避するために1つ以上の関節を曲げた状態でティーチングすることが大切
・特異点回避のために各メーカーでさまざまな対策が行われている
多関節ロボットの特異点とは
ロボットの特異点とはどのようなものでしょうか。特異点を知る前に事前に知らなければならない知識とともに紹介していきます。
ロボットの構造
まずはロボットの構造から知りましょう。ロボットはサーボモータで関節にあたるジョイント部を動かし、アーム部分であるリンクを移動させます。同時に、先端のエンドエフェクタをワークの位置まで移します。

これらの動作を要望通りに行うことがロボットの役割で、目的に沿った動作を実現するためにはロボットの制御が欠かせません。正確な制御を行うためには、数式を用いて演算し、各関節をどのような方向でどれくらい動かせばいいかを決める必要があります。
関節の位置から計算で手先の位置を知り、目的の動作を行わせるためには、さまざまな情報が必要です。そこで、ロボットの制御のために位置を計算する運動学が必要となります。
運動学ではロボットの動作を計算する方法として、順運動学方法と逆運動学方法の2種類があります。
順運動学方法は、関節の回転角度や速度からアームの位置・姿勢を計算する方法です。一方逆運動学では、アームの位置や姿勢から、関節の回転角度と速度を計算します。一般的に逆運動学が用いられることが多いです。
逆運動学では、関節の回転角度や速度を求めるために、ヤコビアン行列という数式を用いて計算を行います。ただし、計算式が複雑であることから、この記事では割愛します。
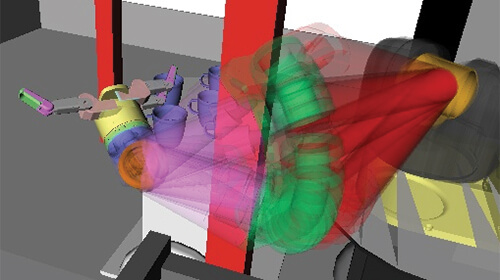
特異点になるとき

特異点とは、計算式上でロボットが制御できなくなる姿勢のことを言います。特異点には複数のパターンがあるため、すべての姿勢を紹介することはできませんが、以下の2つが代表的な特異点です。
- ロボットが伸びきった姿勢の時
- 2つ 以上の軸が一直線上に並んだ時などの姿勢の時
このような状態になることで、ロボットが制御できなくなります。
特異点による問題点
ロボットが特異点に近づくことで速度が急激に速くなり、暴走してしまう危険があります。また、特異点になると停止してしまいます。
そのため、特異点を通るように教示してしまうと、再度生産ラインを停めてティーチングを行わなければならず、生産計画が遅れる可能性もあります。
現在では暴走しないようにさまざまな対策が行われていますが、古い機種を扱っていた場合高い確率で暴走するため注意が必要です。
多関節ロボットの特異点を回避する方法
多関節ロボットの特異点を回避する方法として、先ほどの図のような特異点の姿勢にしないことが大切です。ロボットが伸びきらない状況を作るためにも関節角度を常に曲げた状態で動かす必要があります。
また、特異点を回避するロボットが開発されているため、それらを導入することをおすすめします。
特異点の回避技術
特異点の姿勢にならないような技術がさまざまなメーカーで開発されているので紹介します。
三菱電機

三菱電機では特異点通過機能が備えられている産業用ロボットが販売されています。従来通過することができなかった特異点を問題なく通過が可能です。
そのため、自由にロボットを動かすことができ、特異点を意識せずティーチングができます。特異点姿勢になってしまうことによる生産ラインの停止がなくなるのもメリットです。
デンソーウェーブ

デンソーウェーブのロボットは特異点を回避する機能を搭載。特異点やその近傍を通過するときに自動で経路の補完を行い、スムーズな動作ができます。
MUJIN
MUJINではモーションプランニングAIを搭載した「MUJINコントローラ」を開発しました。従来ロボットをティーチングレスで行う場合、ロボットの干渉や特異点でない経由ポイントを各々教えなければならないという問題がありました。
しかしながら、MUJINコントローラは最低限の経由ポイントを教えれば対応してくれるため、簡単に特異点を回避できるようになります。また、人が教示を行うよりもなめらかな動きが実現可能です。
他の設備との干渉を回避する世界発の技術も備えられており、ほとんどのロボットシステムに対して自動でプログラムを生成できます。
新東スマートエンジニアリング
新東スマートエンジニアリングはロボットSIerと制御システムの開発を行っている企業です。各産業用ロボットメーカーの言語を使用した制御の開発実績が多くあります。
同社では、ロボットの運動学を計算して、特異点をチェックできる制御システムを開発しているため、特異点の回避したティーチングが可能です。
不二越

不二越では7軸垂直多関節ロボット「プレストMR20」を開発しています。6軸の多関節ロボットの場合、動作中に特異点に近づいたとしても回避することが困難です。
しかしながら、7軸であれば1自由度増加したことによって、特異点を回避する余裕ができます。最適な姿勢を簡単に設定でき、スムーズな動作も可能なため、サイクルタイムの短縮を実現します。
まとめ
多関節ロボットの特異点について紹介しました。ロボットには特異点になる姿勢があるため、暴走させないためにも回避する必要があります。
そのためにも、ティーチングを注意して行ったり、特異点に対応した機種を導入したりすることが大切です。
しかし、初めて産業用ロボットを導入する場合、特異点回避のノウハウを持ち合わせていないことが多いでしょう。その場合、システムインテグレータ企業とともにロボットシステムの構築を行うことをおすすめします。
最適な生産ラインの立ち上げのためにも一度相談してみませんか。