目次
円筒座標ロボットとは産業用ロボットの中でも歴史の古いロボットです。具体的にはどのようなロボットなのか、また、用途や他のロボットとの違いについて詳しく解説します。
・円筒座標ロボットとは上下移動と伸縮が可能なアームと回転軸を持つロボット
・円筒座標ロボットは液晶や半導体の搬送に用いられることが多い
円筒座標ロボットとは
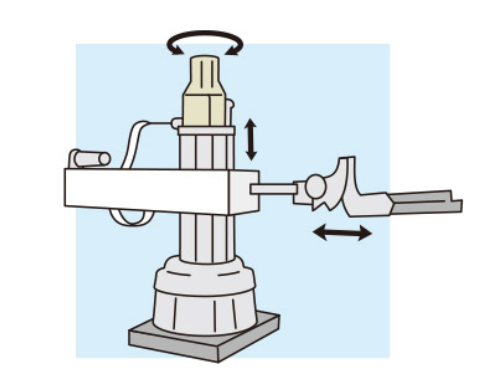
円筒座標ロボットとは、回転軸と上下移動可能かつ伸縮可能なアームを持つロボットのことです。
同じく古典的な産業ロボットに「極座標型ロボット」というものがあります。回転軸と伸縮可能なアームを持つという点では両者は同じですが、円筒座標ロボットはアームが上下移動しますが、極座標型ロボットのアームの高さは固定されていますので、上下移動はしないという点が異なります。
円筒座標ロボットのメリット・デメリット
円筒座標ロボットのメリットとデメリットを紹介します。
メリット:可動領域が広い
円筒座標ロボットは回転軸を中心として360度回転することができるため、可動領域が広いというメリットがあります。しかもアームは伸縮可能なので、さらに可動領域は広がります。
また、回転軸を中心として上下にも動くため、高さが異なるところで作業することができます。横にも縦にも可動領域が広い点が、円筒座標ロボットのメリットといえるでしょう。
デメリット:回り込みが必要な作業には不向き
上下と横の動きが可能な円筒座標ロボットですが、単調かつシンプルな動きのみに対応しているので、細かな作業には向きません。また、同じく古典的なロボットである極座標型ロボットも、細かな作業には向きません。
円筒座標ロボットの用途・導入事例
円筒座標ロボットは、どのような分野で用いられているのでしょうか。用途と導入事例を紹介します。
用途
円筒座標ロボットは、主に半導体や液晶の搬送に用いられています。搬送は反復作業のみ、なおかつ複雑な作業がないため、円筒座標ロボットに適した用途です。
導入事例
円筒座標ロボットの導入事例を2つ紹介します。
ウェーハ搬送(クローズドループ制御機能あり)
クリーンルーム内でウェーハをケースに搬送する作業を行う円筒座標ロボットです。回転軸が4つあるため、手前から奥への移動や微細な高さ調節など、より細かな動きに対応します。また、クローズドループ制御機能があり、急激な負荷の変動や速さの変化にも対応して稼働します。
ウェーハ搬送(電力線通信技術搭載)
同じくウェーハ搬送を行う円筒座標ロボットです。高剛性のあるアームにより、高速作業にも対応可能です。また、通信技術が搭載されているため、操作を外部からコントロールすることができます。工場を自動化する場合にも組み込みやすく、発展性のあるロボットです。
円筒座標ロボットの歴史
50年以上もの歴史を持つ円筒座標ロボット。産業用ロボットの中でも古典的な存在です。その歴史を紹介します。
1960年代後半から国産ロボットが登場
1960年代後半からは、日本国内でも円筒座標ロボットがつくられるようになりました。主に油圧式か空気圧式で駆動していました。
1970年代からは電気制御式がメインに
さまざまな企業が国産ロボットの製作に関わるようになり、円筒座標ロボットの種類も増えていきます。油圧式や空気圧式は制御が難しいことから、1970年代からは電気で駆動するタイプがメインになりました。
1980年代以降は垂直多関節型ロボットが台頭
1980年代以降は、円筒座標ロボットよりも複雑な動きが可能な垂直多関節型ロボットも増えてきました。分野によっては、垂直多関節型ロボットが円筒座標ロボットの仕事を取って代わるようになりました。
円筒座標ロボットと他の産業用ロボットの違い
円筒座標ロボット以外にも主に5つの種類が産業用ロボットとして使用されています。それぞれのロボットにはどのような特徴や違いがあるのか解説します。
- 極座標型ロボット
- 直角座標ロボット
- 垂直多関節型ロボット
- 水平多関節型ロボット
- パラレルリンク型ロボット
極座標型ロボット
極座標型ロボットは、円筒座標ロボットと同じく50年もの歴史を持つ産業用ロボットのなかでは古典的なタイプです。
砲台のように中心に旋回軸があり、作業を行うアームは上下回転と伸縮が可能です。円筒座標ロボットのアームは上下方向に移動して垂直の動きにも対応できますが、極座標型ロボットのアームは上下に回転するため、弧を描くような動きにも対応します。
直角座標ロボット
直角座標ロボットは、縦と横、高さの3つの方向に直交する軸を持ち、立体的な動きを軸のスライドのみで実現します。
似たような動きをする身近な例として、クレーンゲームのアームを挙げられます。アームは水平・縦横・垂直の3つの動きしかしませんが、3つの方向をそれぞれ指定することで空間内の任意の点に移動することが可能です。
直角座標ロボットは、円筒座標ロボットとは異なり回転軸がありません。そのため、回転を伴う作業には対応できません。
垂直多関節型ロボット
垂直多関節型ロボットとは、複数の関節を持ち、回転台の上に据え付けられているロボットです。回転台を腕の付け根とするならば、人間の腕の構造にもっとも近いスタイルのロボットです。
回転と関節が組み合わさることで、動きの自由度が非常に高く、回り込んでの作業も得意とします。しかし、複雑さゆえ、制御が難しいという点には注意が必要です。
円筒座標ロボットのアームは上下方向に垂直に移動することができますが、垂直多関節型ロボットは関節が曲がることで高さの異なる作業が可能になります。現在、産業用ロボットとしてもっとも利用されているのがこの垂直多関節型ロボットといわれています。
水平多関節型ロボット
水平多関節型ロボットは、水平方向の動きだけに特化したロボットです。関節は垂直多関節型ロボットのように曲がらず、回転軸に沿って回転するように同じ高さで水平方向に動きます。
水平多関節型ロボットのアームの先端は、常に水平を保ちます。また、アームに伸縮性がないため、円筒座標ロボットと比べると可動領域が狭いです。なお、水平多関節型ロボットを「スカラ型ロボット」と呼ぶこともあります。
パラレルリンク型ロボット
パラレルリンク型ロボットは、3本のアームが1点につながった形状のロボットです。アームの動きが速いため、ベルトコンベヤーでの選定や整列などの作業に使われることが多いです。
円筒座標ロボットとは異なり、アームは回転せずに上下あるいは前後左右に動きます。また、多関節型ロボットでは関節が縦方向につながっていますが、パラレルリンク型ロボットは関節が横方向につながっている点が対照的です。
まとめ
円筒座標ロボットは、産業用ロボットとしては古典的なロボットです。しかし、誕生後、50年以上が経った現在でも液晶や半導体の搬送に使用されています。ぜひ構造を理解し、求める作業に適したロボットを選んでいきましょう。